
雷锋网按:3D 成像通常被称为自动驾驶的先决条件,但前不久英特尔却收购了 Mobileye,后者是 2D 相机系统的专家,芯片巨人是否买了一个过时的技术?还是说 2D 相机系统依然是自动驾驶中保持数据可控的必要步骤?
“数据是新型石油,”这句话用来形容以色列绝对最为合适——被一众石油国包围的以色列正逐渐占据世界数据服务新的制高点。
提到汽车产业,没有汽车厂商能避开 Mobileye 这家公司。“我们在自动驾驶领域处在领先地位,”Amnon Shashua 自信地说道,这位 IT 专家在 1999 年创立了 Mobileye。如今,Mobileye 在全球汽车厂商的合作伙伴已经高达 27 家。

不过,Mobileye 合作伙伴名单上少了一个名字——特斯拉。去年,一辆特斯拉 Model S 在 Autopilot 模式下遭遇了致命车祸,随后 Mobileye 宣布与特斯拉分手,而在那辆 Model S 上没能探测到卡车的摄像头系统就来自 Mobileye。这次事故并非偶发,因为只搭载单目摄像头的 EyeQ3 芯片本来就能力有限。
英伟达的方式:大幅提升计算能力
对 Elon Musk 来说,自动驾驶技术的发展还是不够快。特斯拉的粉丝都在翘首以盼 Autopilot 2.0,这一版本的系统将大幅提升多项自动驾驶功能,而特斯拉的合作伙伴也换成了英伟达。这家以显卡闻名的公司开发了价值数千美元的 PX2 计算平台,其处理能力是此前系统的 40 倍,一次能搞定 8 颗传感器(相机、雷达和超声波传感器)传输的数据。
值得注意的是,英伟达的解决方案也是自动驾驶两大门派之一,它的理念是通过强大的计算能力处理不断增大的数据量。
在法律领域,全自动驾驶依然是一片空白,无论欧洲还是美国都只在法律上认可 Level 2 级别的驾驶辅助系统。
最近,德国议会也在争论是否批准更高级别的自动驾驶,虽然该草案有许多问题亟待解决且审议时间短,但最终还是顺利通过。
这就意味着,这些车辆很快就能短暂地接管方向盘(Level 3)。只要对道路交通法规进行相应修改,未来驾驶员就会像飞行员一样,在飞行时负责监控自动驾驶系统。这项法案的通过也成了一针强心剂,无论汽车厂商还是科技公司都开始加速自家自动驾驶车辆上路的速度。

*英伟达 PX2 平台
用上 PX2 平台后,特斯拉已经在许多方面满足了 Level 3 的要求,不过特斯拉依然缺乏设计周密的安全概念来应对故障出现时的场景。
“在 Level 3 以上的场景中,我们需要在电子转向、动力供应和刹车等方面获得一定安全冗余。”宝马自动驾驶部门工程师 Elmar Frickenstein 说。“此外,我们还需要 26 个不同的传感器,包括相机、雷达和激光雷达等。”眼下,特斯拉的 Autopilot 2.0 系统依然保留 Level 2 级别的功能,它会更加舒适,但明年德国的汽车厂商会在这一基础上增加更多功能。
Mobileye 的方式:保证数据量可控
据雷锋网了解,在自动驾驶市场,特斯拉、Uber 和 Lyft 都有一定的领先优势,不过 Amnon Shashua 认为这样的说辞未免有些过于简单。
Shashura 代表了自动驾驶界另一拨思潮:尽可能多搜集数据且对其进行有效管理。“在搜集数据上有两种方式,一种是简单的搜集,但这种方式并不正确,Mobileye 的方式则是第二种方式。”Shashua 在最近的博世科技世界大会上说道。
Shashua 反对那种只靠大量数据来实现自动驾驶的做法。“硅谷就在走这条道路,它们的原型车研发实在太快了。利用 3D 成像技术,即使是只有 10 名工程师的新公司也能在半年内快速拿到大量数据。”56 岁的数学大神 Shashua 说道。

*英特尔、Mobileye 与宝马结成同盟
Shashua 毫不犹豫的将这种依靠昂贵激光扫描仪“炫技”的方式看作死路一条。即使是最早涉足该领域的谷歌,在实践中也只有判断交通信号灯时使用摄像头,其他则已经全面 3D 化。不过,这种处理方式的先决条件是自始至终都能用高精地图来定位车辆。
“通过这种地图,车辆无需看到各种标线就能找到路。”不过,高精地图的绘制是用大量金钱堆砌出来的,因此即使从长远目光来看,想将全世界每条道路都绘制成高精地图也不太现实。从资金的角度来看,将高速公路 3D 地图化较为现实。Shashua 表示:“想让自动驾驶技术走上正轨,首先必须降低成本并让它创造真正的经济效益。”
2D 相机系统能降低计算工作量
鉴于以上问题,Mobileye 选择继续将“落后”的 2D 相机系统看作自动驾驶的基础。“相机是唯一能看清道路和各种物体的传感器,它能认出道路的轮廓和纹理。”Shashua 解释道。
除此之外,使用三角测量法后,相机系统还能判断车辆在两个精确测量锚点间的位置。在相对简单且低价的 2D 层级,我们依然能完成相关数据的处理,同时工程师还能将雷达和超声波数据加入其中。因此,计算工作依然能保持在可控状态。
对于那些喜欢化繁为简的厂商来说,这样就不用将“计算性能怪兽”平台当成自家车辆的标准了。
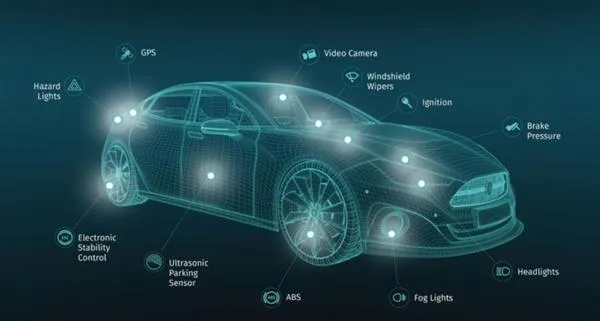
*自动驾驶汽车要搭载大量传感器
眼下,各家厂商都忙着将人工智能纳入自家车辆的道路规划功能中。“驾驶是个多主体的游戏,不过人这个主体却很激进,而且免不了会犯错误。”Shashua 说。
在博世科技世界大会上,他展示了一段自动驾驶车辆在拥堵的高速路进出口连续变道的视频。“道路规划需要特殊的人工智能,因为每次我改变‘驾驶策略’,就会对周边环境产生影响,因此数据需要重新进行搜集。”
算法要充分理解周边环境
自动驾驶汽车不会总在一个环境模型中行驶,因此只是简单的搜集大量传感器数据可不行,而纵观现有的辅助驾驶系统,能贯彻这一理念的并不多。汽车在自动驾驶时,对车辆状态和周围环境有一个清晰的理解更加重要,只有这样才能在快速变化的情况下做出正确的判断。
依靠自家的实时算法,Mobileye 已经在业界创下了性价比之最,而这恐怕是英特尔真正垂涎的。
无论哪个级别的自动驾驶,系统都必须“先知先觉”,这样才能处理越来越复杂的情况。“它必须能明白自己到底看到了什么并预测下一步的动作,我们将这种能力称之为‘意识增强’,它也是人工智能在城市交通中的落脚点。”Shashua 说。
Shashua 将这一困难称为“杀手”,在这一方面,我们还有许多未知问题没能解决。什么时候 Level 3 级别的自动驾驶系统能经受城市交通的考验了,我们才能让 Level 2 系统在高速公路上提供足够舒适的体验。只有做到了这一点,Musk 的洛杉矶至纽约全自动驾驶旅程才能正式成行。