
想要“复制”出拥有人手般“触感”的机械是一项很复杂的任务,而我们这些年也见识到了各种柔性机器人夹具的发展。不过现在,科学家们已经宣布了在这一领域的一个重要进步,演示了能够更好地抓起易碎品的机械装置。由瑞士洛桑联邦理工学院(EPFL)博士生Jun Shintake带领的科学家团队,就开发出了一款能够模拟人类拇指和食指“力道”的夹具。
科学家们想要开发一副柔软的夹子,能够很好地模拟人类食指和大拇指。
其设计由5片皮瓣组成,中间是一个预拉伸弹性体,然后两侧各有两层电极(外侧有两层硅胶)。在正常状态下,这些“襟翼”会向外卷曲。
在电极间有电流通过的时候,它们会被吸引到一起(模仿肌肉的弯曲动作)。不过这种机械爪的真正关键之处,还是由“襟翼”顶尖处联锁电极所产生的静电场。
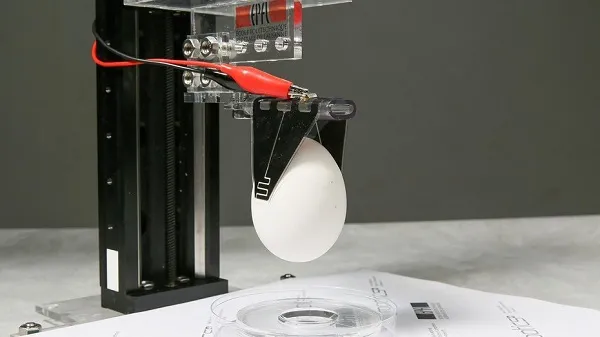
这款机器爪可抓动自身80倍重的物体。
在设备测试中,研究人员们用它抓起了鸡蛋、水囊、纸张等易碎品。与其它软性触手相比,它的优点是能够精确地处理针对不同物体所要使出的“力道”(无需预先知道它们的外形)。
在静电吸附效应的帮衬下,襟翼会轻轻地捏住80倍于自身重量的物体表面。研究人员称这是首次将静电吸附用于柔性机械爪。
Get a Grip with Soft Electronics
不过事实上,早在2013年的时候,就已经有一家名叫Grabit的初创企业在提供面向仓库包装自动化的此类设备了(甚至实验过无人机交付)。
研究人员们称他们的版本是轻量级和可伸缩的,未来有望将之用于收集天空碎片、食品处理、以及先进义肢等方面。