随着人们不断探索宇宙,产生的太空垃圾也逐渐增多。据估计,每秒钟约有50万块由人类产生的太空垃圾围绕着地球转动,速度达到1.75万英里/小时。这些快速移动的太空物体威胁着为人类提供服务的卫星、国际空间站和宇航员们。正因为如此,如何清理太空垃圾成为了天体物理学家们面对的最困难的挑战之一。

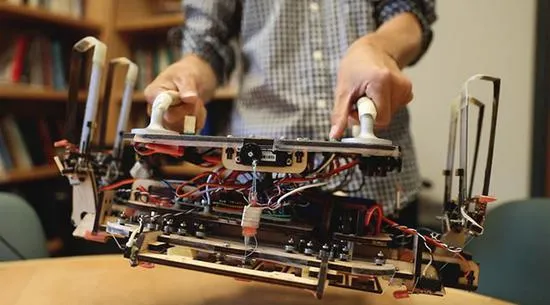
现在,由美国斯坦福大学和NASA喷气推进实验室(JPL)共同研发的一款机器人有望解决这个问题,而给予研究人员灵感的竟然是壁虎。研究人员由壁虎附着在墙上获得启发,研制出一种粘合物质使用在攀登机器人上。现在这个机器人已经在实验室和零重力环境下进行了实验,实验证明一片相对较小的粘合物质就能拖动一个重达300公斤的机器人。

机械工程教授Mark Cutkosky表示,自己和团队从10年前就开始这项研究。清理垃圾这个看上去简单的动作在太空却十分困难。因为太空是真空环境,所以抽吸技术不起作用;此外,很难生产出可在巨大温差下使用的粘性物质;最后,磁铁也只对磁性材料起作用。
在种种困难之下,壁虎的脚就成为了科学家们新的研究方向。壁虎的脚十分强壮,他们的脚趾上有许多刚毛,而刚毛上又有许多分叉,攀爬时这些分叉会与物体表面完全接触,产生范德华力。Cutkosky教授研发的机器人就采取了和壁虎大体相同的设计。现在,该设计还将使用更坚固的材料来制作,并将在国际空间站进行测试。