
这些年来,无人驾驶是业界的热门话题。近日,斯坦福大学的助理教授Marco Pavone成功研发出一款太空机器人,可拖拽太空碎片使之离开轨道、向宇航员提供所需的工具并进行行星探索。据悉,这项风马牛不相及的发明为无人驾驶提供了关键技术支撑,无人机和无人驾驶汽车或成最大赢家。
Marco Pavone曾就职于NASA的喷气推进实验室,此前他曾在项目中多次与斯坦福大学合作。进入斯坦福后,Pavone的研究方向是太空机器人在不同环境下的适应性问题。他在研究中发现,从某种意义上说,一些为无人驾驶汽车开发的技术十分适合太空机器人控制,而太空机器人的算法同样适用于无人驾驶。
环境感知
Pavone的项目一个重点是帮助机器人实现自主导航。不同于地表,在太空中一旦你碰到一个物体,它的位置和状态将会变得难以预测,它也很难再次静止下来。由于机器人的一大作用是将太空碎片清理出轨道,因此“追捕”旋转的、运动的物体是必备本领。为了解决这个问题,Pavone与机械工程教授Mark Cutkosky展开了合作,后者用了10年时间打造出了一款仿壁虎足部吸盘的夹具。
在有了“壁虎”夹具的加持下,机器人的抓取难题解决了,但是如何掌握精确导航并不是一件容易的事。
Pavone和合作者设计了一种算法:当机器人靠近航天器、太空碎片或其他物品时,机器人能根据位置信息进行自主判断,计算出运动的最佳路径和抓取时机,这里隐含着一种对于抓取目标状态的预判断。一旦时机合适,机器人便用“壁虎”夹具牢牢抓住物体。有了这种算法,机器人就能实现实时移动抓取,它的决策运算速度为每秒几千次。
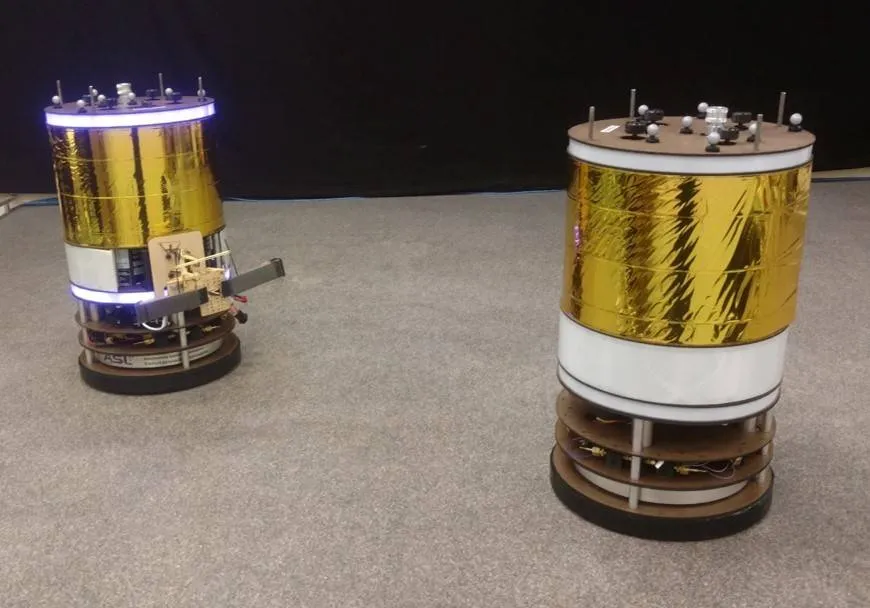
装备“壁虎”夹具的太空机器人
据悉,这种自主判断方式有助于无人机和无人驾驶汽车的自主导航。以无人机为例,就当前的技术水平而言,当一架高速运动的无人机突然遭遇建筑物、人或其他无人机,它很难做到准确、及时避让。设备的自主导航和环境感知之间存在一种微妙的关系,因此环境信息是设计导航算法的一个关键。
目前,Pavone和研究生Benoit Landry正在开展“知觉感知计划”,旨在让无人机不仅能规划最快的行驶路线,还能“看到”周围环境,并更好地估测它们的位置。太空机器人的核心技术正用于地面无人机和无人驾驶汽车,这是空间技术与商业技术的完美合作。
行星上的自由“漫步者”
Pavone的学生Ben Hockman则在解决机器人在小行星上会遭遇的最大难题——低重力环境下的自主导航。众所周知,行星的引力和它自身的质量相关,在进行太空探险时,一旦机器人登陆在了一颗小行星上,行驶尚且会成为一个不小的难题,何况是导航。
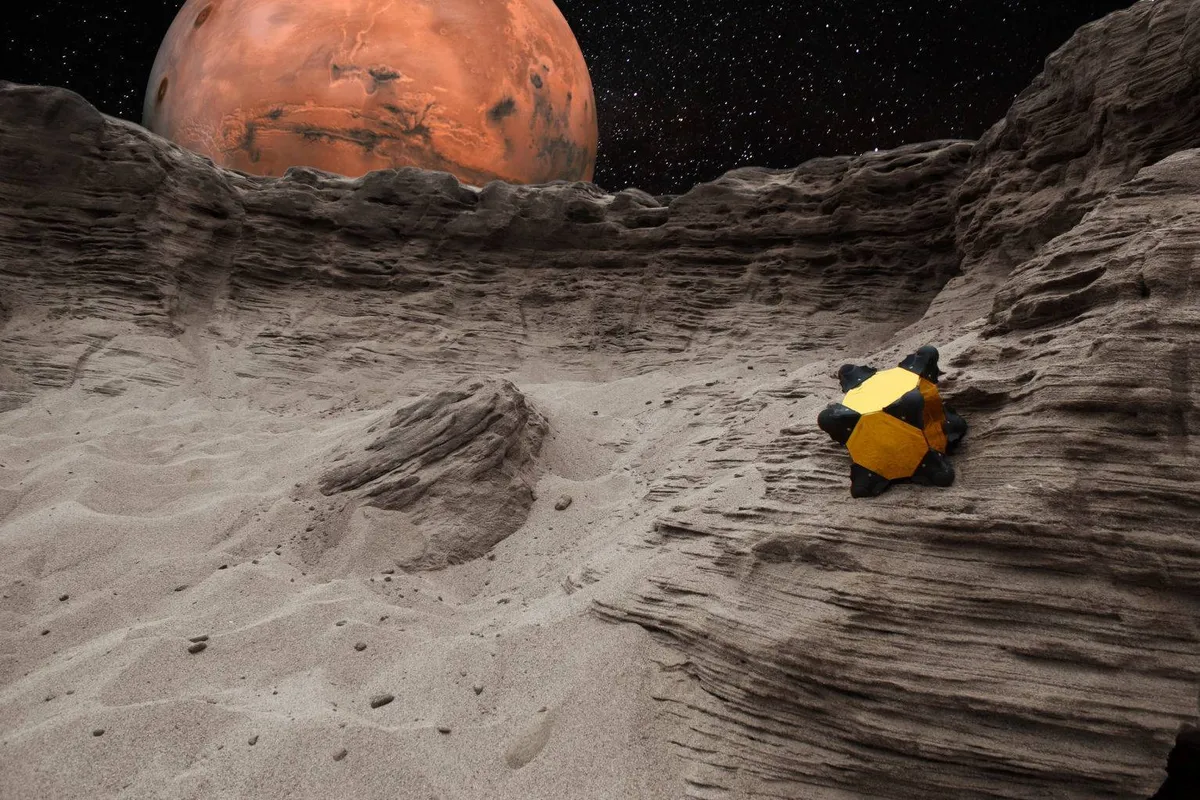
Ben正在研究的立方体机器人Hedgehog
Ben的研究对象Hedgehog是一个立方体机器人,它的8个角上都装有弹性材料。当面对凹凸不平、土质坚硬、低重力的小行星地表环境时,它的运动方式不是传统的履带/车轮式前进,而是跳跃。Hedgehog虽然是针对低重力环境设计的,但它同样适用于地球,研究人员还在研究它的自主导航系统,希望它能自己到达作业目的地,而无需百万英里外的人类操心。
Hedgehog的技术可用于一些地面搜救机器人,毕竟如何跨越崎岖地形还是特种机器人的一个发展瓶颈。