
想要获得安全可靠的道路行驶能力,自动驾驶汽车必须对其周围环境有全景式的了解。它不但需要认出周边呼啸而过的轿车、卡车、摩托车,同时还要发现慢吞吞的自行车和行人。
此外,交通信号灯、路牌和路上的障碍物它们也不能放过。不过,这还不是最考验自动驾驶汽车的事物,让各家公司花费大量时间和资源搜集数据的各种天气和光照条件才是自动驾驶能否真正上路的最高门槛。毕竟如果不能穷尽每一种可能性,谁也不敢保证上路的自动驾驶汽车会不会惹出什么乱子。
一般来说,想让自动驾驶汽车实现眼观六路耳听八方,研究人员必须对大量数据进行标记,而这些标记过的数据将成为机器学习算法的养料。
对数据做标记可不是件轻松的工作,每家厂商都会派成百上千的工作人员处理车辆拍摄的照片或视频,他们需要用方框圈出旁边的车辆、路标等物体,同时还得给它们贴上相应的标签。令工作人员绝望的是,这个标记数据的过程需要一遍又一遍的重复。
密歇根大学的研究人员想出了更好的解决方案:在模拟中完成整个过程。对于自己的想法,研究人员也是底气十足,因为他们已经证明这种方法比人工标记真实数据要高效的多。
不过,机器人专家们并不看好模拟的方式,因为模拟事实上是简化版的现实世界,在模拟中取得成功并不代表在现实世界中能实现百分之百的安全。
密歇根大学的研究人员并不服输,在上周新加坡举办的 IEEE 机器人与自动化国际会议上,他们就找来了游戏大作《侠盗猎车手5》,试图通过该游戏证明虚拟世界也能训练深度学习系统识别物体。这种方法靠谱吗?且听雷锋网(公众号:雷锋网)为您详细分析:

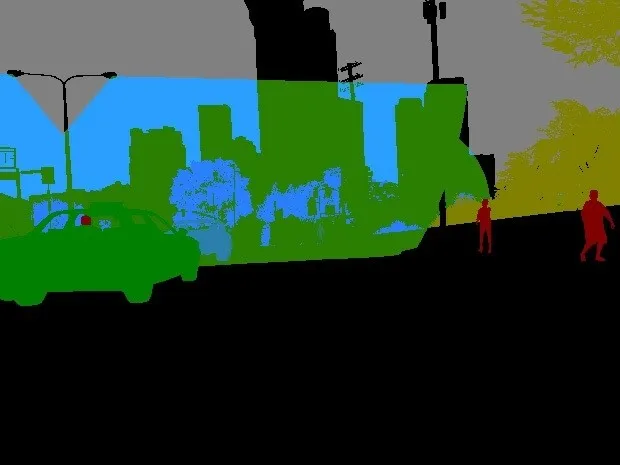
《侠盗猎车手5》中一系列用于目标识别的图片
通过模拟的方式来完成训练其实可以一举三得:
首先,速度可以得到大幅提升,而且与真车在路上采集数据相比费用要少得多。
其次,在模拟中数据标记就变成现成的,毕竟游戏程序对画面中出现的物体属性非常清楚。
最后,在模拟环境中你可以设定任何的刁钻路况或天气情况,而在加州路上做测试,你会发现这里总是阳光明媚,根本没什么挑战。
此外,在模拟环境中你甚至可以为同一路段设定不同的天气或路况,实现事半功倍的效果。
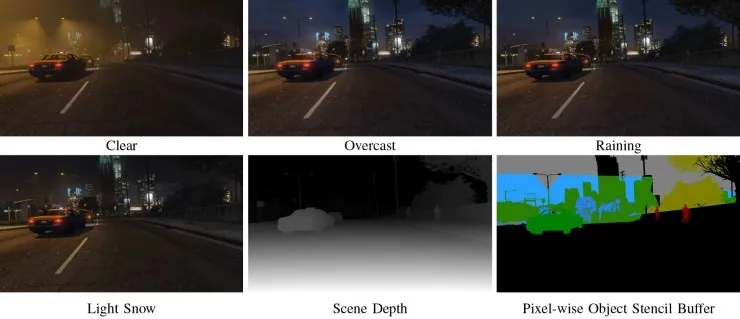
在同一路段模拟不同的天气情况
为了检测虚拟世界中的训练效果,研究人员在游戏中生成了 3 个模拟数据集,它分别包含 1 万、5 万和 20 万张不同的游戏图片。
随后,深度学习目标探测系统开始以这些数据集为基础进行训练。当然,研究人员还准备了另一个实车拍摄的数据集,名为 Cityscapes 的数据集包含有 3000 张经过手动标注的图片,同样的深度学习系统也会以该数据集为基础进行训练。
训练完成后,两套系统需要对名为 KITTI(也是实车实拍,但与 Cityscapes 不同)的数据集中 7500 张图片进行目标识别测试。
结果显示,在模拟环境中训练出来的深度神经网络识别效果更好:用 5 万和 20 万张图片训练出来的深度神经网络表现要好过 3000 张的数据集。研究人员解释称,单张的模拟图片价值并不高,但如果它们的数量足够多,效果就会非常棒。
确实,单张模拟图片的训练效果不如单张实拍图片,毕竟现实世界中的光源、颜色和纹理信息变化是电脑模拟无法比拟的,因此模拟图片只能以量取胜。
不过,只要有足够的计算能力,我们就能生成超多的模拟图片,最重要的是这些图片不再需要人为标记了。
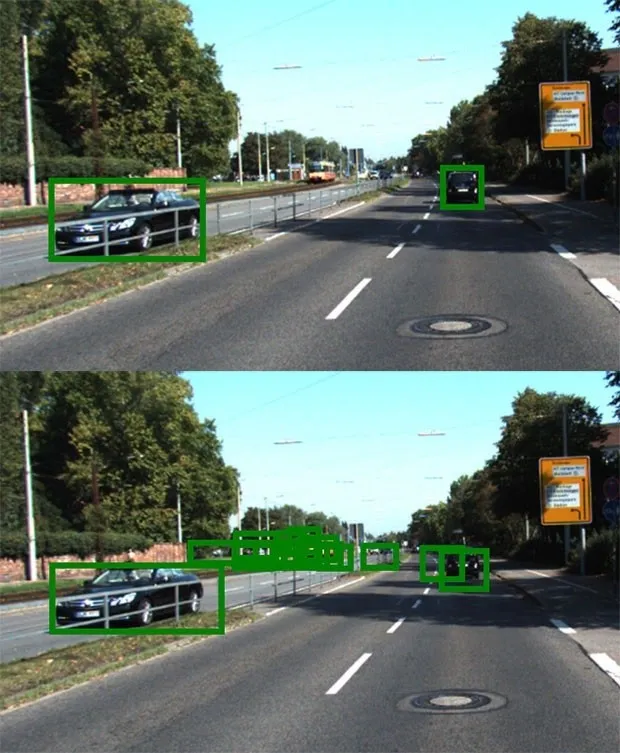
模拟图片(上)中的误报明显更少
除了以上优势,在虚拟世界中训练出来的神经网络在识别较远和模糊车辆的能力上也更胜一筹。同时,这种方式也能减少误报。也许这种优势也是拜模拟图片巨大的数量所赐,它包含的数据更宽泛,能为训练提供更加多样化的输入。
当然,用模拟图片训练神经网络也有其内在缺陷:首先,虚拟世界不同于现实世界,一些难以预测的情况它模拟不出来,而这些情况是自动驾驶最大的安全杀手。
不过,虽然我们无法靠《侠盗猎车手5》来解决所有问题,但密歇根大学的研究人员确实给我们指了条明路,它能大大降低各家厂商的成本,提升训练效率。