
即便你是独生子女,但小时候应该也有和堂兄妹抢玩具、食物的经历,现在回想起来真的是很美好的事情。当然,抢东西这事儿有输有赢,另外你发现没,你会通过对弈次数的增加、不断了解对手的章法和套路,从而更好地应对,这就是人类与生俱来的学习能力了。
谷歌和卡内基梅隆大学的开发者正是以此为灵感,做出了一套机器学习算法应用在机器人上,让它像周伯通一样“左右互搏”,通过两只机械臂互相抢东西,来提升其抓取稳定性,非常有意思。
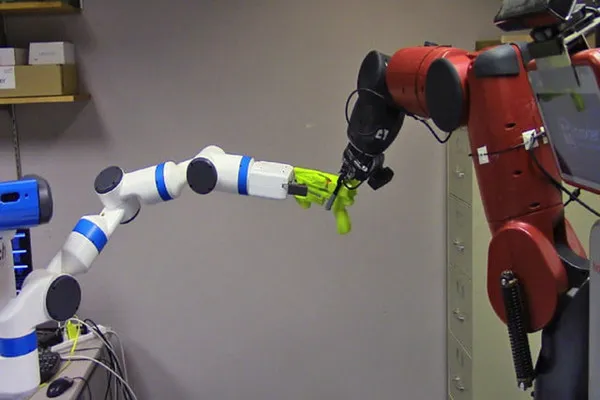
机器人一只手抓着一个圆柱形物体,另一只手去抢。在没有加载算法前,基本上“侵略者”非常轻松地就把东西抢过来了;而加载算法、并经过几次训练之后,进攻的那种机械手居然失败了,防守方更牢固地抓住东西防止它抢夺。
不仅如此,经过锻炼的那只手臂,在自己独立工作时也能够更稳定地抓住物体,这便是这个算法的目的。
负责该项目的卡内基梅隆大学机器人研究所博士Lerrel Pinto表示,这种对抗性算法有助于机器人实现更好的自主学习,从而快速适应新的工作环境和同伴。这种基于游戏理论的洞察力算法,采用了深层学习技术,随着时间的推移,机器人会越来越聪明。
似乎,机器人和AI又学会了人类的一个技能,我们只希望它们不要某一天开始研究人类弱点,然后开始对抗人类。