
长期以来,机器人界一直希望造出通体由软性材料构成的机器人,但开发出柔性的供能和控制元件一直是难点,例如现在很多研究人员纷纷都在开发柔性电池和电路板。去年 8 月份,哈佛大学用“气动”取代“电动”,制造出了世界上第一个完全软体的且自我驱动的机器人,而现在浙江大学开发出由柔软的扑翼推动的软体机器人。新智造作为雷锋网旗下栏目,关注智能时代的创新与创造,目标是找到这个行业还存在哪些机会。
为了让机器人表现的越来越好,机器人专家们正在为其打造灵活的身体。事实上,软体机器人有很多优势:一方面,软体机器人能够在现有合规条件下更安全的工作,防止造成不必要的伤害;另一方面,机器人也能够做出更多独特的运动方式。但对于软体机器人来说,最大的问题是在供电或移动时,必须做出一些妥协,因为大多数设备组件并不够“软”,比如电池和执行器。
但是在过去的一周左右时间,行业内已经发明除了两种有效提升软体机器人运动的新方法,一种是利用外部磁场,另一种则是利用电场为扑翼提供能量支持。
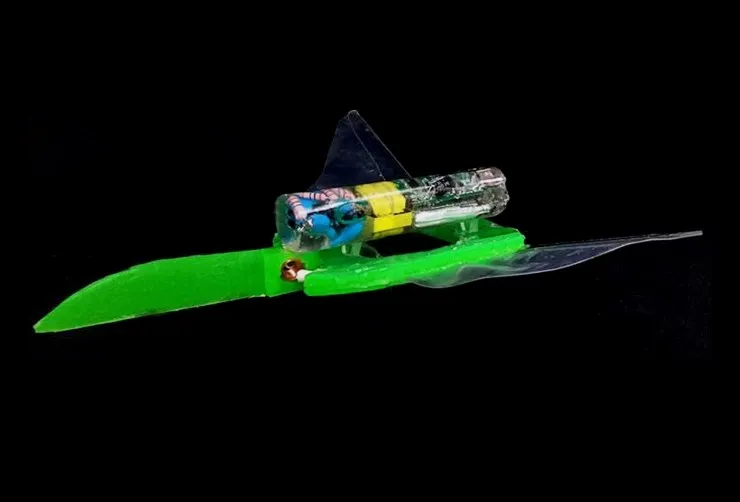
浙江大学发明了软体机器人能够由柔软的扑翼推动,这些扑翼是有弹性电介质制成的,当它们被施加电压时,就会弯曲。介电弹性体的响应非常快,而且运动幅度也相对较大,不过它们需要非常高的电压(大约 10 千伏特)才能有效运转。一般来说,介电弹性体会被覆盖在绝缘层中,但是这种机器人可以在水下工作,所以研究人员能够将所有绝缘层都浸没在水下,依靠水作为电极和电厂。
当然,这个软体机器人设计还有其他几个原因值得注意。首先,它几乎是完全透明的,身体、翅翼、尾巴和弹性体肌肉都是完全透视。所以,当你添加不受限制操作时所需要的电子元件和电池时,运动效果可能会不太尽如人意,但事实上,这个软体机器人体内可以自身包含所有可支持其运动的设备,包括一个 450-mAh、3.7 伏的电池,能够确保它以每秒 1.1 里面的速度在水中游动 3 小时 15 分钟。不仅如此,这个软体机器人身上甚至还可以搭载一个微型摄像头,其最高运动速度可以达到每秒 6.4 厘米,而且能够在高于冰点低于 75 摄氏度的水中毫无压力地畅游。
这个机器人的整体功率消耗,大致和一条虹鳟鱼相当,因为一条长约 25 厘米的虹鳟鱼如果以每秒 10 厘米的速度游动,需要消耗 0.03 瓦特的能量。当然,真正的虹鳟鱼游动的速度更快,但对于机器人而言,相对生物学效率显然要高得多。现阶段,研究人员还不知道这种机器人能够有哪些具体的实际应用,所以目前它应该还是一种原理性的概念技术,或许在下一代机器人身上能够看到更多实际应用。
浙江大学的T. Li, G. Li, Y. Liang, T. Cheng, J. Dai, X. Yang, B. Liu, Z. Zeng, Z. Huang, Y. Luo, T. Xie, and W. Yang 在 Science Advances 网站上发表了文章——“快速移动的软体电子鱼”。
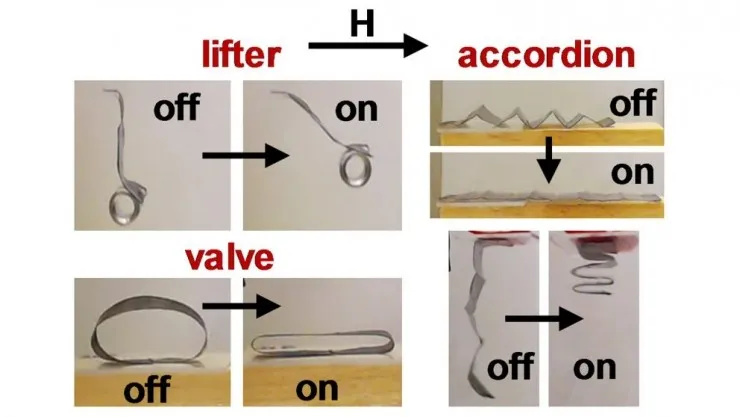
与此同时,在北卡罗来纳州,研究人员也一直在研究更基础的驱动技术来挖掘软体机器人的潜力——他们已经设法将聚合物膜转化成能够通过磁场远程致动的肌肉。此外,研究人员还将铁微粒引入到液体聚合混合物中,然后向磁珠施加磁场,让这些微粒排成一条水平链。当这些液体聚合物变干,并且切成条状时,整个水平链依然能够持续存在,此时如果给他们再施加一个磁场,水平链即会与之对准,牵引聚合物跟随它们。
通过改变磁场强度和方向,可以调整聚合物的结构,研究人员也因此可以创造出一套能够实际应用的软体执行器,比如能够提起比自身重量重五十倍的悬臂,一种能够伸长或收缩的折叠式结构(像肌肉工作原理一样),一个具有蠕动泵功能的、运动压缩波管。
这些执行器看上去似乎价格都比较便宜,而且易于构造,但同时他们也有一定的局限性,比如需要对外部力量做出响应才能执行运动。但是,它们在体内微型机器人上能够很好地运作,或者能够在不需要持续执行操作的、可部署的机器人身上得到较好应用。
VIA ieee