
Shakey 是全球首具备移动能力的智能机器人,在电气工程和计算机科学项目中获得了 IEEE 里程碑奖项。这个奖项是颁发给电气工程和计算机科学领域中,自开发后历经 25 年仍被公认为对社会及产业发展有巨大贡献,能够造福人类的重要发明、重要事件等。
昨天在美国加州山景城的计算机历史博物馆内举行的一场落成典礼上,Shakey 的原班团队成员受邀再次聚集在一起。为了纪念这个里程碑,[雷锋网(公众号:雷锋网)]重新分享 1969 年的记录短片,再次展示了 Shakey 是如何产生深远影响的。
正如锻刻在青铜徽章上的内容,IEEE 里程碑的引文中写道:
斯坦福研究所的人工智能中心研发了全球首个移动、智能机器人 Shakey。它可感知周围环境,根据明晰的事实来推断隐藏含义,创建路线规划,在执行计划过程中修复错误,而且能够通过普通英语进行沟通。Shakey 的软件架构、计算机图形、导航方式、开创性的路线规划都为机器人的发展带来了深远的影响,都已经融入到网页服务器、汽车、工业、视频游戏和火星登陆器等设计中。
下面是 SRI International 对 Shakey 的描述:
Shakey,是根据走路蹒跚的特性而命名。机器人拥有电视摄像头,三角测距仪和碰撞传感器,并通过无线电和视频连接到 DEC PDP-10 和 PDP-15 计算机上。Shakey 使用程序为感知、世界建模和动作进行支持。低级别动作程序掌控简单的移动、转向和路径规划;中级别的动作程序以各种方式串联各种低级别动作程序,从而完成更加复杂的任务;而最高级别的程序则能够定制和执行计划,从而实现用户给定的目标。这个系统还能推广和保存这些计划,从而保证未来能够使用。
最初在 1966 年,Shakey 需要通过 SD-940 计算机进行控制,需要占用 64K 24-bit 的内存。在 Fortran 和 Lisp 上的编程,Shakey 的问题转移到 QA3 系统上进行处理。在 1969 年,控制设备被“更大的”PDP-10 取代,占用 192K 36-bit 内存。随后使用 STRIPS 系统来解决问题,后来又开发了 QA4 系统。在拍摄这段纪录片时候,Shakey 的编程代码占用了 300000 36-bit 内存。
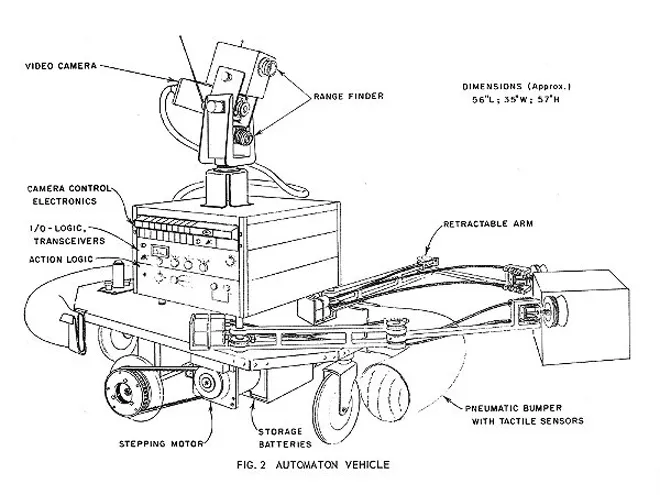
Shakey 在 1965 年的早期设计,Shakey 的伸缩臂至今仍未创建出来。
斯坦福研究所(现在称之为 SRI 国际)研究员兼 Shakey 项目经理 Charles Rosen,最初在 1963 年 11 月提出了这个机器人构想。Rosen 和他的团队在 1965 年向 DARPA 撰写了一份研究计划书(PDF),详细叙述了能够执行侦查任务的智能自动机器人。
DARPA 最终向研究人员提供了 75 万美元资金,相当于现在的 580 万美元,来创建 Shakey。Shakey 同时也在 2004 年纳入卡内基梅隆大学的机器人名人堂。

Shakey 所收集的视频和传感器信息会通过计算机进行加工处理
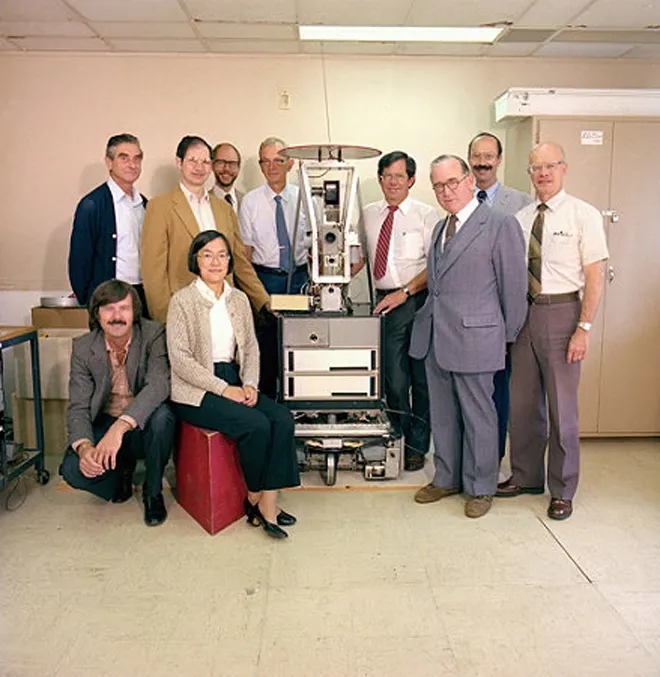
Shakey 机器人团队在 1983 年的合照
全球第一个移动机器人 Shakey 视频:https://v.qq.com/x/page/q0376oth26w.html?start=19