
德国弗莱堡矿业大学的机器人教授 David Vogt 的儿子酷爱乐高。在某个天高云淡的日子里,当他和儿子一起拼乐高时,突然有了个绝妙的灵感:“我可以教机器人怎么玩乐高吗?”仔细想想,让儿子和机器人一起拼乐高的话,真的非常有意思呢!
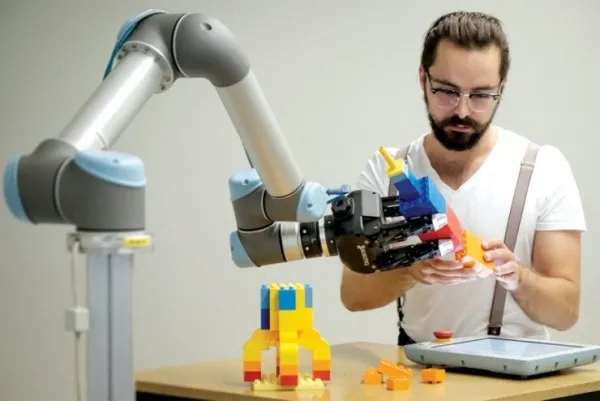
这位有爱的父亲绝对是行动派——他马上将工业机器人手臂带进了实验室。上图这个配备了 Kinect 深度摄像机的机器人,可以在观察两个戴着运动跟踪标签的人玩乐高的过程中进行学习。在一个学习小节过后,机器人就可以和人类合作一起拼乐高火箭了。最绝的是,当人们不知道某一块到底应该放在什么位置时,机器人还可以出谋划策。作为机器人通过人类示范进行自我学习的典例,这项研究成果将展示在下个月举办于墨西哥坎昆的国际人形机器人会议上。
对此,来自苏黎世联邦理工大学的 Aude Billard 认为,人们可以通过观察别人的行为进行学习,但是将一个新技能编入机器人程序则非常困难。这是因为,作为人类的我们,凭直觉就知道应该如何完成一些任务,但是却很难对这部分知识进行编程。
所以,机器人专家们才另辟蹊径,让机器人自己观察人类的示范,而不是通过编程直接告诉它们应该怎么完成任务。另外,在研发的初期,人类可以对机器人进行一些远程的遥控,通过触觉反馈的嗡嗡声让它们积累经验。去年,马里兰大学的机器人已经开始通过在 YouTube 上观看人们烹饪的视频学习如何煮菜了。
除了 Vogt 团队和马里兰大学的研究成果外,这个月初,谷歌的研究团队也通过手把手教学,指导机器人如何开门。在实验的最后,机器人自己打开了一扇类似的门。这意味着,即使机器人自己开的这扇门的位置和之前有所不同,它们还是可以顺利开门。
对此,谷歌的研究人员表示:
“在许多操作技能上,人类的直觉起到了很关键的作用。所以,只有当我们把这样的直觉转化到机器人身上之后,它们的学习效率才能提高。”
另一个关键的因素是,要确保数据的转化对某一个机器人而言是有效可行的。其中要考虑到的问题是,很多机器人并没有可以反射人类解剖学构造的结构和感应器。在这个方面,Billard 的看法是:
“作为一个称职老师,你必须明白的是——你教导的这个机器人具备各种行为方式,同时,它对于这个世界也存在多种理解方式。”
最后,Vogt 带领的研究团队总结做出了这样的总结:人类的示范可以让机器人在需要纯熟技能的工厂中更好地辅助人类。这意味着,在工人在需要它们的时候,它们可以成为很好的辅佐工具,也可以独立完成一些任务。对此,来自美国亚利桑那州立大学的团队成员 Heni Ben Amor 说道:“人类和机器人可以协同完成一些任务。这么一来,人们的工作量将大大减轻。”
via Newscientist