
几周前,我们发布了宾夕法尼亚大学Vijay Kumar's Lab的研究成果,他们仅仅通过机载定位,就可以让四轴无人机快速通过狭小的缝隙。这个重大研究成果意味着无人机可以不再依赖外部定位系统,实现自我避障。值得一提的是,在这项研究中,无人机可以预先提供这个狭小缝隙的位置和定位信息,而不是在钻进去的时候才能做出识别。
27日,苏黎世大学机器人技术和感知研究团队的带头人Davide Falanga, Elias Mueggler, Matthias Faessler和Davide Scaramuzza教授分享了一些他们投给2017年IEEE机器人与自动化国际会议(ICRA)的研究成果。他们的研究中涉及到的无人机具备与上文提到的自动避障无人机相似的功能,但功能的实现不是都靠机身搭载物(包括感知障碍),这就是它们在自动化开发上的一些突破。
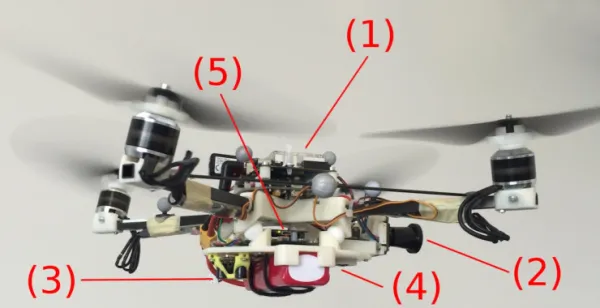
上图就是苏黎世大学研发团队在实验中用到的四轴无人机。(1)机载计算机;(2)向前的鱼眼摄像机;(3)TeraRanger One远距离感应器;(4)向下摄像机;(5)PX4自动飞手。发动机可以倾斜15度,提供三倍的偏航控制,同时集体推力只会降低3%。
为了让这些无人机在体积比它们大1.5倍,且两侧边缘距离仅有10厘米的缝隙间飞行,研究团队使用了752 x 480像素、搭载了180度视场的透镜和一个型号为PX4FMU,搭载了惯性测量装置和用机器人操作系统(ROS)的智能手机级别的单板机Odroid XU4 电脑的自动驾驶仪。在通过缝隙之后,无人机会使用向下距离传感器和摄像机保持自身稳定。所有的感应和计算过程都是在无人机机身上实现的,这意味你可以在居家环境中完成整个操作过程。
尽管整个平台是定制的,但是大部分硬件都是标准化的。其中一个引人瞩目的调整是,无人机的旋翼倾斜了15度,这在对推力没有影响的情况下,将偏航控制提高了三倍。强大的偏航控制非常重要,因为四轴无人机在接近缝隙时,角速度最高可达每秒400度。
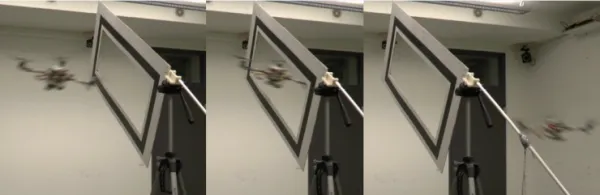
真实世界中,无人机穿过窗户的全过程是这样的:首先,无人机会通过它身上搭载的摄像机对缝隙进行定位。接着,它会计算出一个可以通过缝隙的轨道,这个轨道要让无人机离边缘越远越好,同时也要让这个缝隙被无人机的摄像机捕捉到越多越好。这个轨道基于缝隙横断物,所以无人机要能够高速移动且实现侧偏的定位,这么一来,系统就需要找到第二条轨道,它可以让无人机平稳悬停后在缝隙中穿越轨迹。如果将这两个轨道放在一起,就可以确定通过缝隙的路径了。
一旦无人机向缝隙前进,它会尽可能地保证它的摄像机瞄准缝隙的边缘,持续更新和它尝试要钻进的空间的相关状态估计,并且尽可能地重新规划轨迹。假设它顺利通过了缝隙(成功率大概是80%),最后一步就是让自己从疯狂的速度和定位中恢复过来。
这样的技能非常酷炫,但很难让人不对机器人自行完成各种感应和计算的重要性大肆渲染。当然,想要将这些技能应用到现实世界中,还是存在一些门槛的:这不仅仅是让无人机穿过窗户,更是教会它们如何在任何环境下(从热带雨林,到城市地貌,到你的卧室),可靠地快速通过各种障碍。
以下是IEEE采访Scaramuzza教授的全纪录。
IEEE Spectrum:在研发过程中,你们遇到的最大的挑战是什么?
Davide Scaramuzza:我觉得最大的挑战是将感知和控制结合起来。要知道,人们总觉得这两部分是分开的。实际上,要机器人针对缝隙实现定位,需要确定一条轨道,它可以让四轴无人机永远面朝缝隙,而且可以在处理各种不确定状态的时候,遵循车辆动力学原理,重新规划轨道。另外,在通过缝隙的过程中,无人机需要与缝隙的边缘保持尽可能大的距离,防止碰撞。将所有限制融合到一个简单的轨道规划问题上是非常重要的,因为当无人机飞向缝隙的时候,可行轨道的数量会大大降低。另外,当无人机离缝隙非常近的时候,它就看不到这条缝隙了,这让它可以在没有任何视觉反馈(即全盲)的情况下顺利通过缝隙。
我们可以用两个步骤解决这些问题。我们计算了一条可以让无人机在全盲条件下通过缝隙的方法,这多亏了缝隙长度较短以及它需要预先输入数据(即给定幅度和零角速度)。要通过缝隙,我们使用了生成轨道法,它让我们可以估测多个备选轨道,针对每个备选轨道,我们会计算无人机和装载的摄像机的最佳定位以及缝隙方向。在短时间内,我们会选择最佳轨道,它可以保证缝隙永远都可以被看见,并且缝隙的中心离图像的中心非常近。这个方法还可以让无人机飞行得非常快,这让它能够接近缝隙并且在找到更精准的角度时,重新规划轨道。
IEEE Spectrum:无人机可以飞成一列通过缝隙吗?它在完成这样的表演时,会遇到什么限制条件?
Davide Scaramuzza:如果我们改变策略,让无人机持续快速飞进缝隙,而不是将它们固定在某个盘旋的位置上的话,它们是可以列阵飞过的。主要的限制就是无人机自身的敏捷度,这一点可以通过将它的重量/惯性转变成限制条件来实现。如果使用一个小型且敏捷的四轴无人机的话,在穿过第一个缝隙之后、接近另一个缝隙之前的这段时间内,它更能保持平衡;另一方面,如果无人机非常笨重,那么在快速通过缝隙之后,它的恢复过程要更长,也就是说要花费更长的时间它才能重新飞过另一个障碍。总的来说,如果无人机的重量减小了,我们就可以缩短每个缝隙障碍之间的距离了。
IEEE Spectrum: 这项研究可以应用在其他方面吗?比如避开树木或者是路灯什么的?
Davide Scaramuzza:当然!避开像树木和路灯这样的障碍是我们接下来即将面对的挑战。其实这些避障场景都非常相似,我们的解决方法是除了识别外,当我们保证不会发生任何碰撞时,把杠杆的距离缩小到的极限(为了将整体飞行时间降到最短)。
IEEE Spectrum: 如果这项研究中用到的是商业无人机或是娱乐无人机的话,会有多困难?
Davide Scaramuzza:其实并不会很难。我们只需要一个搭载在无人机身上的摄像机,一个惯性测量装置和一台计算机。目前,几乎所有商业无人机都有这样的硬件配置,然后再加上合适的算法,我们就可以用它进行类似的研究了。
IEEE Spectrum:您的下一步研究计划是?
Davide Scaramuzza:我们计划将这项研究变得更加多元化。一方面,我们要让无人机在不停止的情况下通过多个缝隙;另一方面,我们会让缝隙动起来,或是在静止的缝隙上安置悬浮荷载。最后,我们希望它能够在树木、杠杆和其他类似的障碍物之间实现通行。