
软体机器人是一种新型柔韧机器人。由于不像传统机器人那样用坚硬的机械零件制造,软体机器人能减少对动物或人类造成伤害的可能性。在最近发表的一项研究中,哈佛大学的研究人员详细介绍了一种功能类似肌肉的新型驱动器,旨在进一步减少软体机器人对人体造成的意外伤害。
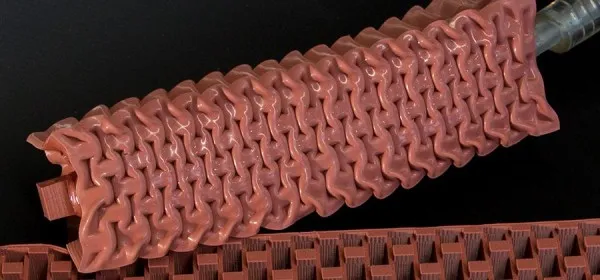
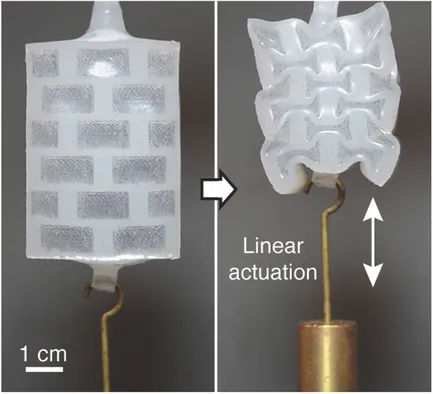
在George Whitesides带领下,哈佛的这组研究人员“模拟人类的二头肌肌肉”创造了一种全新的柔性驱动器。该系统采用了真空驱动肌肉风格的气动结构。 这个结构模仿了真实收缩的肌肉运动。由于使用真空压缩袋柔性驱动器的体积得到缩小。驱动器本身由柔性橡胶制成,其内部为中空蜂窝状空气室。研究人员表示,这个内部蜂窝结构本身可进行调节,并根据需要使驱动器以特定的方式移动。
研究人员发现,即使这个系统出现了一个2mm的小洞,仍能继续保持运作。
哈佛研究人员称,目前Soft Robotics公司已被授权使用这套系统。